קבוצה של 20 סטודנטים להנדסה מאוניברסיטת בן גוריון יזמה והקמנו צוות אשר השתתף בתחרות robosub הבינלאומית לרובוטיקה מטעם ה auvsi. בניית צוללת אוטונומית ראשונה מסוגה בארץ אשר תיתן מענה בעתיד לצורכי מחקר ושירותים תת ימיים.
במסגרת אירוע החדשנות והטכנולוגיה innovation 2013 שיתקיים היום (26/6/13) באוניברסיטת בן גוריון בנגב. באירוע ייקחו חלק מרצים מן השורה הראשונה בתחום היזמות וההיי-טק, גורו היזמות והטכנולוגיה ד"ר דוד שריד, מנכ"ל גוגל ישראל, מאיר ברנד, מנכ"ל המרכז למצויינות EMC, ד"ר ארנה ברי.
בכנס יוצגו מאות פיתוחים של סטודנטים מהאוניברסיטה מתחומים שונים- בין הפיתוחים תוצג הצוללת האוטונומית.
הצוללת שפותחה ע"י סטודנטים להנדסה מהאוניברסיטה, הנה פיתוח חדשני ותייצג את ישראל בתחרות הרובוטיקה היוקרתית (auvsi) המתקיימת בוושינגטון
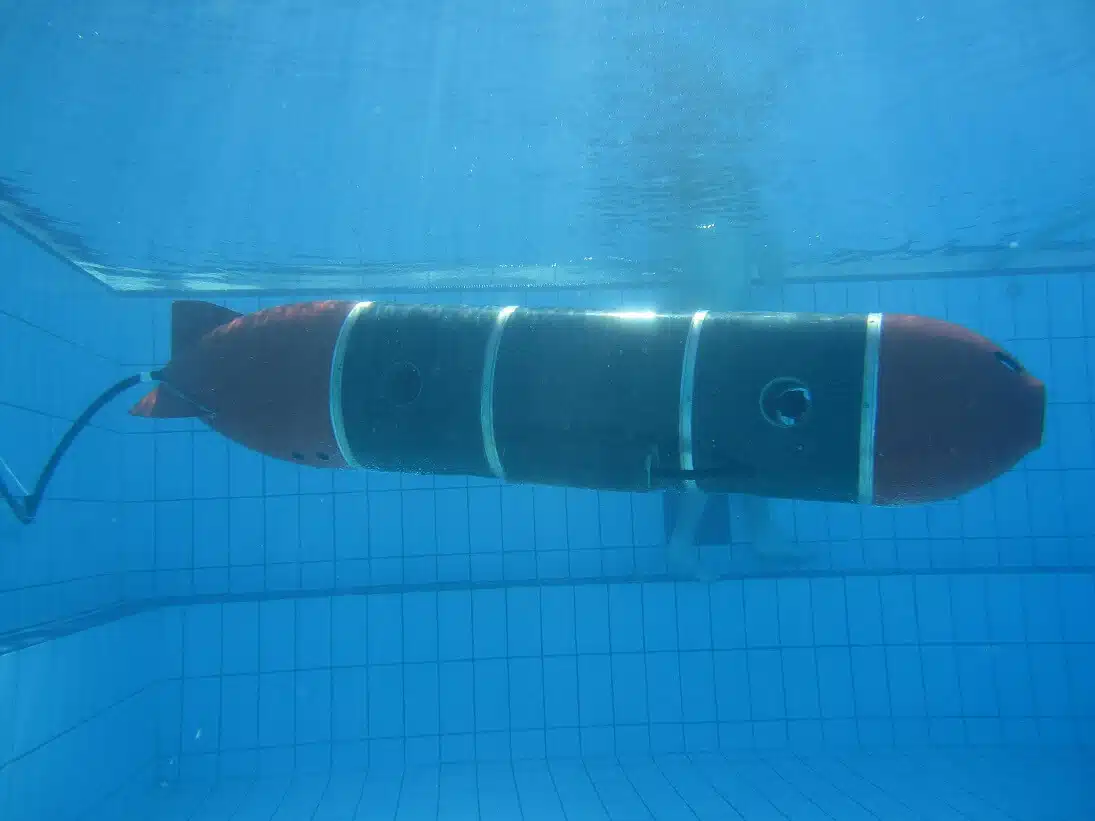
הצוללת האוטונומית
קבוצה של 20 סטודנטים להנדסה מאוניברסיטת בן גוריון יזמה והקמנו צוות אשר השתתף בתחרות robosub הבינלאומית לרובוטיקה מטעם ה auvsi. בניית צוללת אוטונומית ראשונה מסוגה בארץ אשר תיתן מענה בעתיד לצורכי מחקר ושירותים תת ימיים.
נכון להיום קיימות צוללות המופעלות מרחוק המשחקות תפקיד חשוב בתעשיית הים שכוללת בדיקת שלמותם ותקינותם של צינורות תת ימיים, מיפוי שדות מוקשים תת-מימיים, חיפוש מקומות אפשריים לפריסת כבלי תקשורת, חיפוש כלי שיט שטבעו וחקר סודות האוקיינוס. יחד עם זאת חשוב להכיר כי לכלים ימיים אלו אפקטיביות המוגבלת על ידי כבל תקשורת וקשר קבוע למפעיל אנושי. מכיוון שכך, כלי תת ימי אוטונומי יהיה כלי חשוב לביצוע המשימות הנ"ל. בהתאם לכך הבנו כי קיים צורך בצוללת אוטונומית אשר תהיה מצוידת במערכת ניווט אינטליגנטית שתכלול פונקציות לתכנון משימה, הימנעות ממכשולים וקבלת החלטות שאיננה נופלת באיכותה ממפעיל אנושי. ומכיוון שכך שאיפתנו לאחר התחרות הינה להמשיך ולפתח את הרובוט ולהביא את הצוללת ליכולת אמתית אשר תשים את מדינת ישראל בחזית הטכנולוגיה בפיתוח כלים ימיים אוטונומיים כפי שנעשה בעבר בתחום האווירי.
הפרויקט החל במאי 2012 ותאריך יעד הסיום היה מאי 2013
מפרט הצוללת:
גודלה של הצוללת כמטר וחצי ובמשקל של 40 ק"ג . על הצוללת ממוקמים 6 מנועים אשר מקנים לה יכולת תמרון גבוה ב-5 צירים ובמהירות של עד 2 מטר בשניה. כמו כן על הצוללת ממוקמת זרוע רובוטית אשר מאפשרת פעולות מורכבות שונות. הצוללת עובדת בצורה עצמאית לחלוטין ולא תלויה במפעיל חיצוני. עליה נמצא מחשב שיודע לעבד ולנתח בזמן אמת את מיקומה במרחב והשלב במשימה בו היא נמצאת. הצוללת נעה באופן אוטונומי ויודעת לחשב את מסלול התנועה שלה ולעקוב אחריו באופן עצמאי. ביכולתה לצפות בעיות ולתכנן דרכי התמודדות איתן.

6 תגובות
NH
במרחב יש 6 צירים – 3 למיקום ו-3 זוויות. הכוונה ב-5 צירי תנועה הוא מעט מסובך. ברכב יש 2 צירי תנועה: קדימה/אחורה ושמאלה ימינה. במטוס קונבנציונלי יש 4 צירי תנועה: ציר האורך (מנוע), ו-3 צירים זוויתיים (2 בסטיק ואחד בדוושות). ישנם מסוקים שיש בהם 5 צירי תנועה: קדימה/אחורה, מעלה/מטה ועוד 3 זוויות (עלרוד, גלגול וסבסוב).
אני מניח שלצוללת הזאת ישנם אותם צירי תנועה כמו המסוק שתיארתי: אפשא לגלגל את הצוללת, להזיז את החרטם מעךה/מטה ושמאלה ימינהף ואפשר לשנות את גובה הציפה (אבל זו השערה…..)
אלמוני
אם היית קורא את הכתבה לא היית יוצא טמבל….
הצוללת הזאת היא חבית…
לא יודעת לעשות כלום!
הרבה יחסי ציבור על כלום
כדאי לחשוב על שימוש נוסף בצוללת זו והוא ארכיאולוגיה ימית. בעשרות השנים האחרונות מתגלות ערים ששקעו בים. אחד המקומות המפורסמים הוא ביונוגני באוקינאווה יפן.
NH,
אני מניח שהכוונה היא לזה:
http://en.wikipedia.org/wiki/Aircraft_principal_axes
כנראה בצוללות אין Roll
מה הכוונה בתנועה ב 5 צירים, במרחב יש רק 3.